
SoRoN
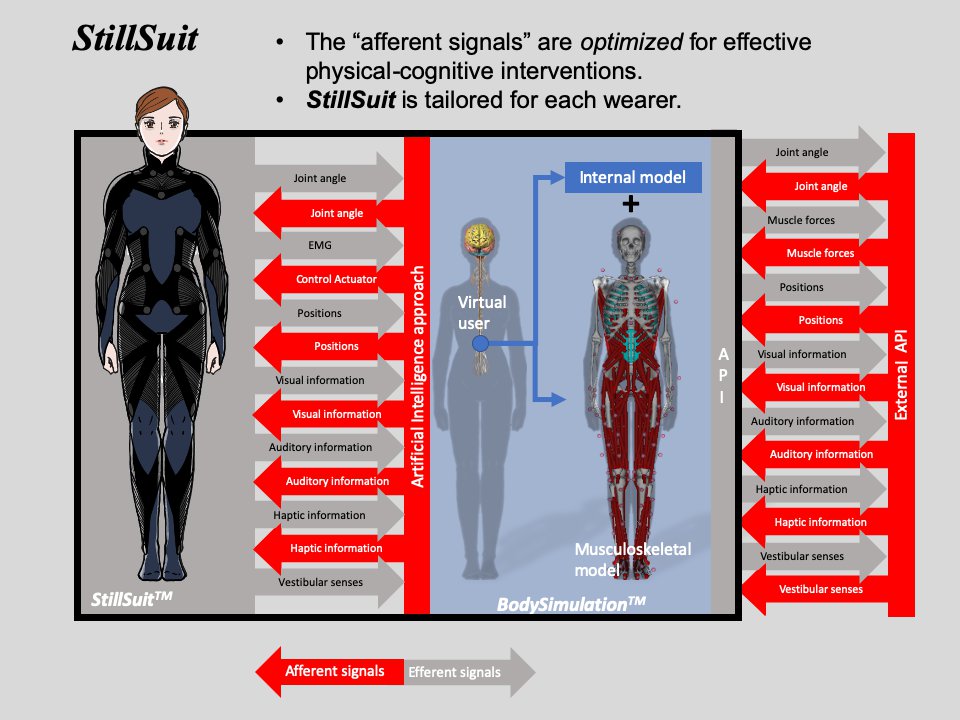
We have been developing an endoskeletal robot suit (StillSuit) to support the aging society. Our StillSuit is designed for cognitive and physical interventions on the human mind and body by taking advantage of endogenous flexibility, namely, remodeling.
![]()
Project Description and Objectives
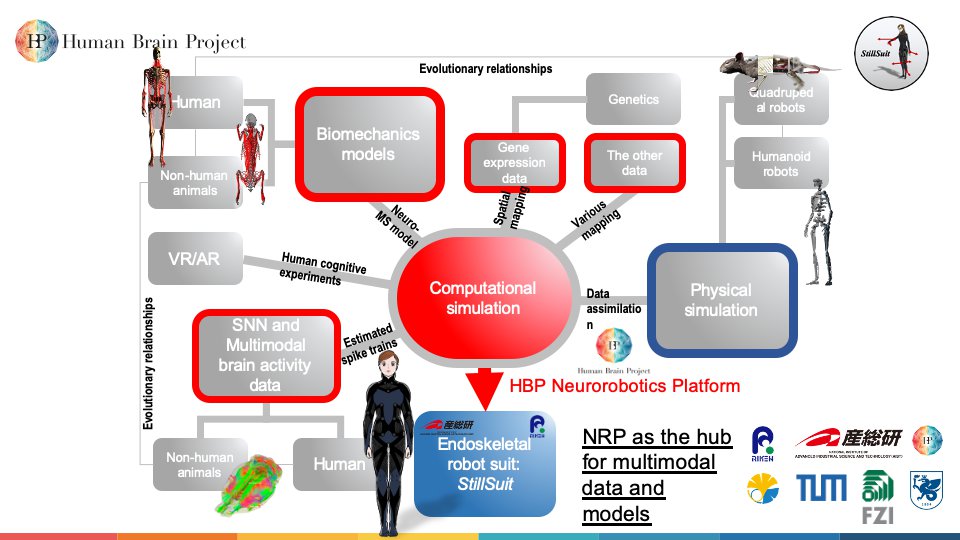
Our approach is based on the implementation of biologically relevant neuro-musculoskeletal models in the HBP Neurorobotics Platform (NRP) framework, by which we achieve the embodiment of the computational brain model in the physical world. The musculoskeletal models considered for inclusion comprise non-human animals and human-based models with feasible yet sufficient granularity. These models are obtained by using an in-house X-ray CT scanning device and advanced image processing, which allow us to extract functional-anatomical information from experimental animals. Motion data are obtained by motion capture systems, collaborating with animal experimentation facilities.
These biologically relevant musculoskeletal models make it possible to analyze neurological and motor phenotypes relevant to human health and diseases in animal models: i.e., we conduct computational and physical experiments with the body models/neurorobots integrated with the computational brain model. Through this process we aim to elucidate fundamental mechanisms of neuro-motor functions of human and non-human animals.
With the same tools, another goal will be the study of retargeting (functional mapping) of the musculo-skeletal systems and associated motor control schemes between evolutionarily related species (e.g., rodents and humans), in both biological models and physical/virtual neurorobots. To that end we will implement algorithms that have been developed in RIKEN: these automatically transform a controller created for a given body into a controller adapted to a second body with different kinematics. We will then use the NRP to study the functional relevance of the obtained controller in simulation, and therefore gain insight about the performance of the retargeting algorithm. This approach may enable us to establish principles of motor control that are invariant across species, and in parallel to probe the usefulness of these tools for robot design.
Partnering Organisations
![]()
Biography
Satoshi Oota
Satoshi Oota received his BS in the Open University of Japan (OUJ) in 1993, MS in Computer Science from Japan Advanced Institute of Science and Technology (JAIST) in 1995, and his Ph.D. in Genetics from The Graduate University for Advanced Studies (GUAS; SOKENDAI) in 1998. He is currently a senior research scientist in the Center for Advanced Photonics at The National Institute of Physical and Chemical Research, RIKEN. He has been at RIKEN since 2004.
Publications
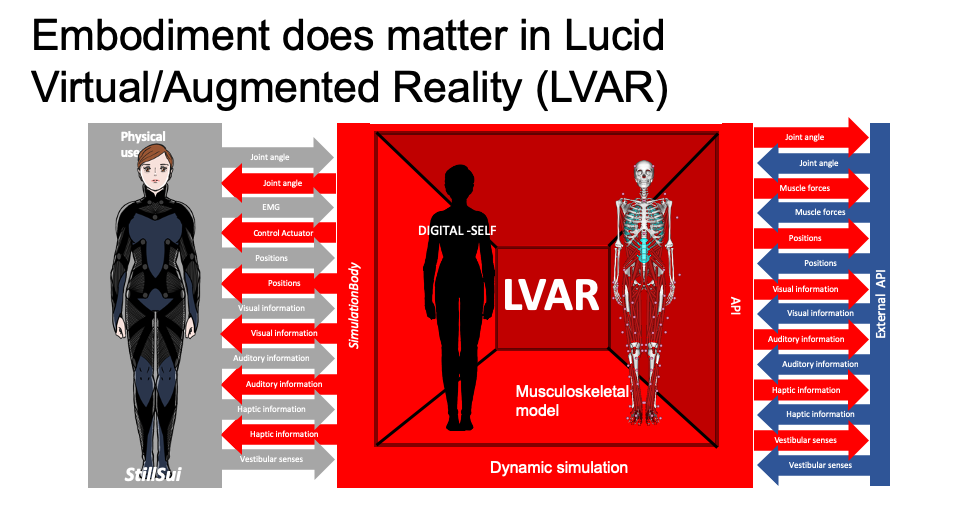
S. Oota, A. Murai, and M. Mochimaru, "Lucid Virtual/Augmented Reality (LVAR) Integrated with an Endoskeletal Robot Suit: StillSuit --- A new framework for cognitive and physical interventions to support the ageing society," The First IEEE VR Workshop on Human Augmentation and Its Applications/co-located with IEEE VR 2019 (OSAKA), p. In press, 2019. [Online]. Available: https://sites.google.com/view/haa2019.
P. Lucas, S. Oota, J. Conradt, and A. Knoll, "Development of the Neurorobotic Mouse," Proceedings IEEE International Conference on Cyborgs and Bionic Systems, 2019.
S. Oota et al., "Neurorobotic approach to study Huntington disease based on a mouse neuromusculoskeletal model," 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pp. 6720-6727, October 1-5 2018.
K. Ayusawa et al., "Interspecies Retargeting of Homologous Body Posture Based on Skeletal Morphing," 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pp. 6712-6719, October 1-5 2018.
Key facts
Time frame: 2018 - 2020
Origin: Spontaneous Application